


Publications

Myoelectric, Myo-Oxygenation, and Myotonometry Changes during Robot-Assisted Bilateral Arm Exercises with Varying Resistances
Authors: Hsiao-Lung Chan 1, 2, Ling-Fu Meng 3, 4, Yung-An Kao 1, Ya-Ju Chang 2, 5, Hao-Wei Chang 1, Szi-Wen Chen 2, 6, Ching-Yi Wu 3, 7, 8
Affiliations:
- Department of Electrical Engineering, Chang Gung University, Taoyuan 33302, Taiwan
- Neuroscience Research Center, Chang Gung Memorial Hospital, Linkou, Taoyuan 33305, Taiwan
- Department of Occupational Therapy and Graduate Institute of Behavioral Sciences, Chang Gung University, Taoyuan 33302, Taiwan
- Division of Occupational Therapy, Department of Rehabilitation, Chiayi Chang Gung Memorial Hospital, Chiayi 61363, Taiwan
- School of Physical Therapy and Graduate Institute of Rehabilitation Science, Chang Gung University, Taoyuan 33302, Taiwan
- Department of Electronic Engineering, Chang Gung University, Taoyuan 33302, Taiwan
- Department of Physical Medicine and Rehabilitation, Chang Gung Memorial Hospital, Linkou, Taoyuan 33305, Taiwan
- Healthy Aging Research Center, Chang Gung University, Taoyuan 33302, Taiwan
Journal: Sensors - February 2024, Volume 24, Issue 4, Article no. 1061 (DOI: 10.3390/s24041061)
-
Field & Applications:
- Medical
- Sport
- Treatment evaluation
- Neurology
- Muscle development / Performance
- Fatigue / Overtraining
Robot-assisted bilateral arm training has demonstrated its effectiveness in improving motor function in individuals post-stroke, showing significant enhancements with increased repetitions. However, prolonged training sessions may lead to both mental and muscle fatigue.
We conducted two types of robot-assisted bimanual wrist exercises on 16 healthy adults, separated by one week: long-duration, low-resistance workouts and short-duration, high-resistance exercises. Various measures, including surface electromyograms, near-infrared spectroscopy, heart rate, and the Borg Rating of Perceived Exertion scale, were employed to assess fatigue levels and the impacts of exercise intensity.
High-resistance exercise resulted in a more pronounced decline in electromyogram median frequency and recruited a greater amount of hemoglobin, indicating increased muscle fatigue and a higher metabolic demand to cope with the intensified workload. Additionally, high-resistance exercise led to increased sympathetic activation and a greater sense of exertion. Conversely, engaging in low-resistance exercises proved beneficial for reducing post-exercise muscle stiffness and enhancing muscle elasticity.
Choosing a low-resistance setting for robot-assisted wrist movements offers advantages by alleviating mental and physiological loads. The reduced training intensity can be further optimized by enabling extended exercise periods while maintaining an approximate dosage compared to high-resistance exercises.
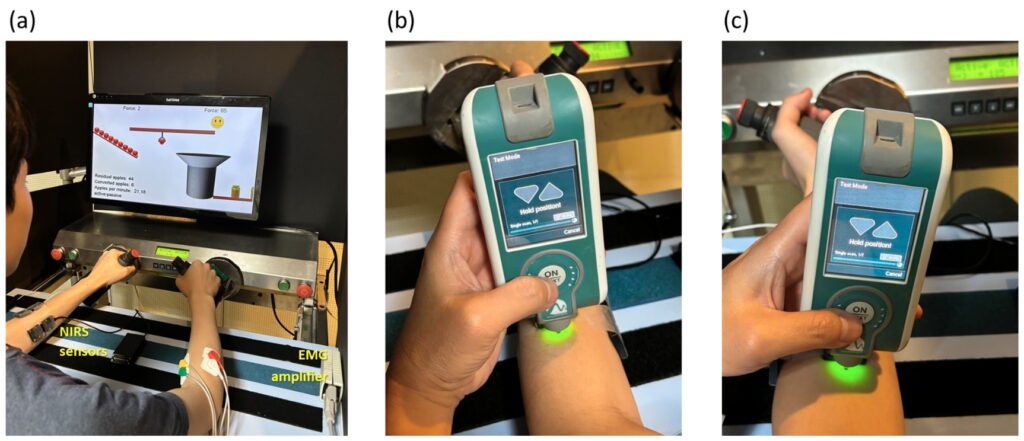
Figure 1. (a) During the experiment, a subject engaged in repetitive robot-assisted wrist pronation and supination movements using the Bi-Manu-Track, while being concurrently monitored with near-infrared spectroscopy (NIRS) and electromyogram (EMG) measurements on the left and right flexor carpi radialis and extensor carpi radialis. Resting myotonometry was performed on (b) the upper section of the muscle belly of the left extensor carpi radialis and (c) the corresponding area of the left flexor carpi radialis separately.
Keywords: robot-assisted bilateral arm training, exercise intensity, muscle fatigue, mental fatigue,electromyogram, muscular oxygenation, myotonometry, heart rate
In this study, robot-assisted bimanual wrist exercises were conducted with two distinct resistance levels. Utilizing evidence from EMG, NIRS, and Borg RPE, we identified that robot-assisted exercise challenges various types of structures and exerts differing influences on muscle activation and the subjective feeling of exhaustion levels. Our findings underscore the significance of factoring in exercise intensity when designing robot-assisted rehabilitation programs. High-resistance exercise is associated with increased sympathetic nervous activation, a heightened sense of exertion, greater muscle fatigue, and an elevated metabolic demand to manage the intensified workload. Conversely, choosing a low-resistance setting in robot-assisted wrist movements provides benefits by reducing post-exercise muscle stiffness, enhancing muscle elasticity, and minimizing both physical and mental exertion.
When embarking on extended training programs aimed at enhancing muscle strength, function, and recovery across diverse populations, including individuals with conditions such as strokes, Parkinson’s disease, multiple sclerosis, spinal cord injury, etc., it is crucial to consider the potential manifestations of fatigue (central, peripheral, or a combination). This necessitates the exploration of personalized exercise protocols tailored to optimize the advantages of training while concurrently minimizing fatigue and discomfort based on individual requirements and fitness levels.
Furthermore, the present experiment involved having the dominant hand drive the movement of the non-dominant hand. It is important to note that this protocol introduces a limitation, as the relationship differs from the unaffected hand driving the affected hand in post-stroke hemiplegia. Further research is needed to elucidate exercise-induced fatigue in post-stroke hemiplegia. This requires employing an integrated analysis approach that incorporates various measurements. Additionally, combining robot-assisted exercises with other interventions, such as neuromuscular electrical stimulation, could potentially enhance rehabilitation outcomes and contribute to a more comprehensive understanding of fatigue in this specific population.